コントローラー・ドライバ等
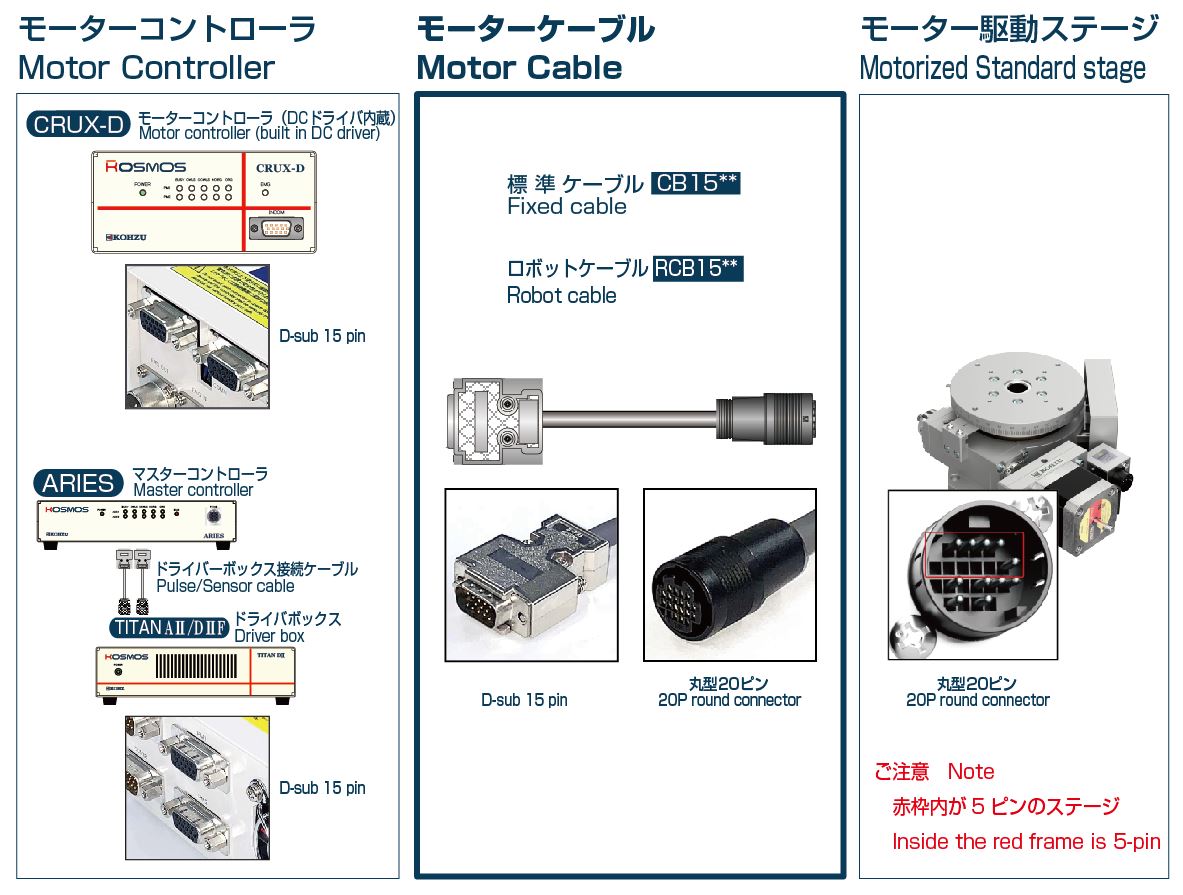
モーターコントローラ コスモスシリーズ
ドライバ内蔵型2軸

価格(JPY)
¥127,000
ハンディコントローラ

価格(JPY)
¥21,000
ドライバ分離型多軸


ハンディターミナル
価格(JPY)
¥99,000
ドライバボックス


価格(JPY)
お問い合せください
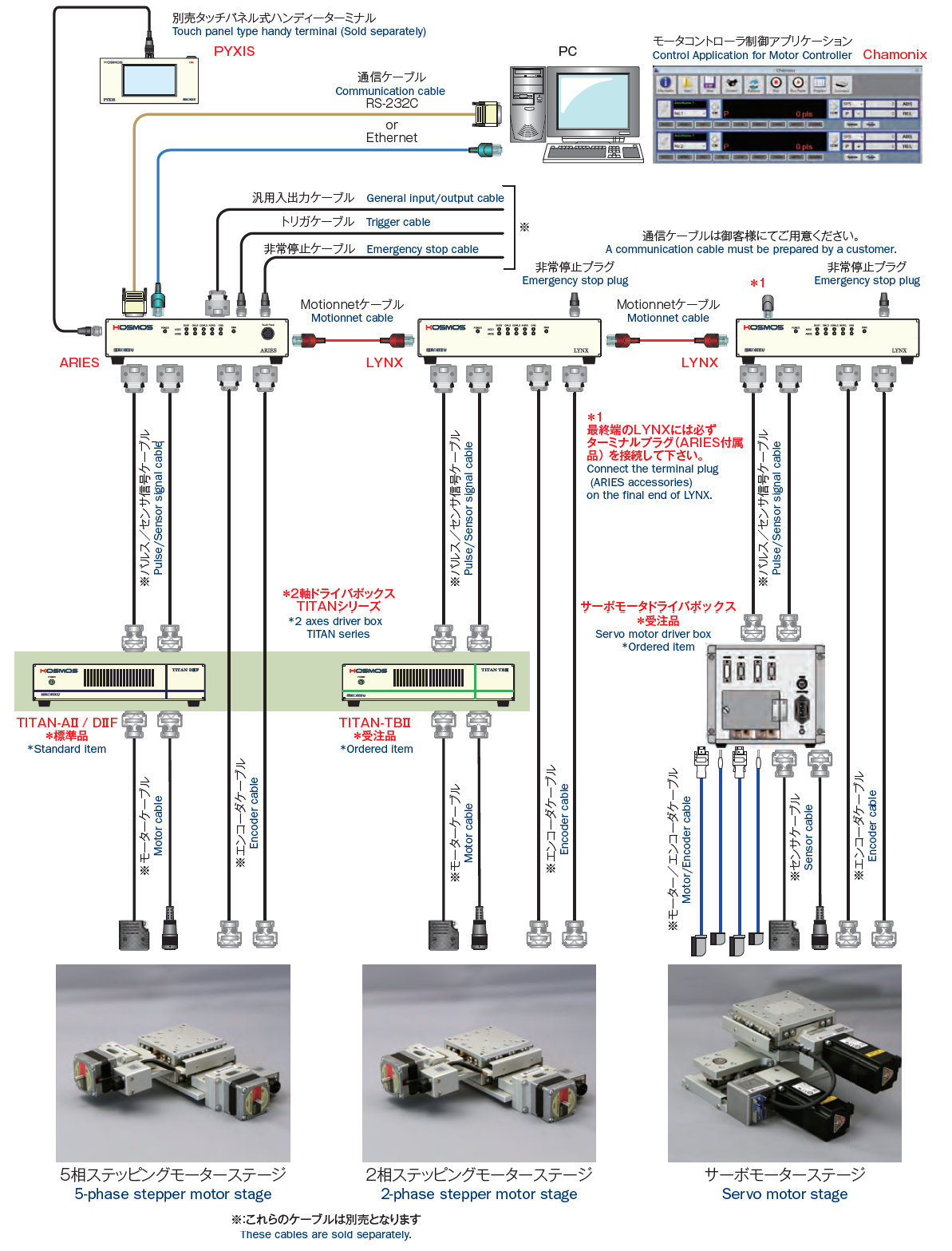
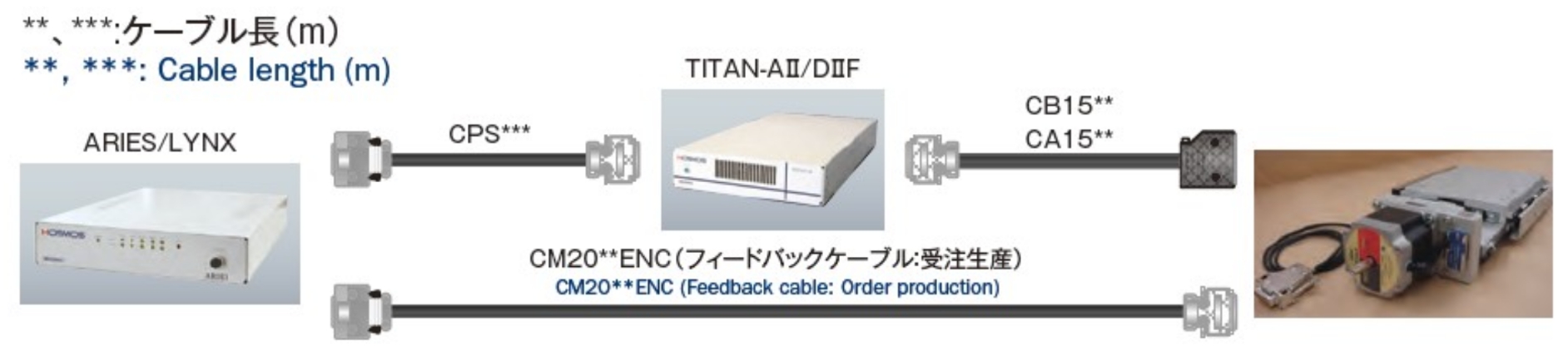
ドライバーボックス接続ケーブル(ARIES/LYNX↔TITAN)
コントローラーユニット(ARIES、LYNX)とドライバーボックス(TITAN)を接続するためのケーブルです。
| 型式 | 品名 | 価格(JPY) |
|---|---|---|
| CPS005 | パルス/センサー信号ケーブル0.5m | ¥8,000 |
| CPS010 | パルス/センサー信号ケーブル1.0m | ¥8,000 |
| CPS015 | パルス/センサー信号ケーブル1.5m | ¥8,000 |
| CPS020 | パルス/センサー信号ケーブル2.0m | ¥8,000 |
アプリケーション
- KOSMOSシリーズや旧SCシリーズを制御するアプリケーションです。
- モンブランシリーズのすべての自動ステージに対応しています。
エンコーダの読み取り、フィードバック制御※にも対応しています。 - 自動ステージの位置座標を登録し、座標ごとに、速度、待機時間、さまざまな駆動パターンを設定できます。
簡単な条件文をつけることもできます。
※CRUX/CRUX-A/CRUX-Dはエンコーダ入力がありません。エンコーダをご使用の場合、ARIES/LYNXをご利用ください。


アプリケーションダウンロード
| 製品 | モーターコントローラ制御アプリケーション 『Chamonix』(シャモニー)(無料) |
|---|---|
| コントローラ | KOSMOSシリーズ(ARIES及びCRUX) SCシリーズ |
| 通信形式 | RS-232C USB Ethenet(TCP/IP) |
| ダウンロード(圧縮ファイル) | Chamonix_Ver.1.2.4_ja.zip |
| 備考 | Ver.1.2.4(ZIP 37.1MB) |
| 製品 | CRUX/CRUX-A/CRUX-D USBドライバ |
|---|---|
| コントローラ | CRUX/CRUX-D/CRUX-A※ |
| 通信形式 | USB |
| ダウンロード(圧縮ファイル) | KOHZU_USB_DRIVER.zip |
| 備考 | Ver.1.0.0.0(ZIP 9.8MB) |
※インストール方法はCRUX/CRUX-D/CRUX-A取扱説明書をご覧ください。
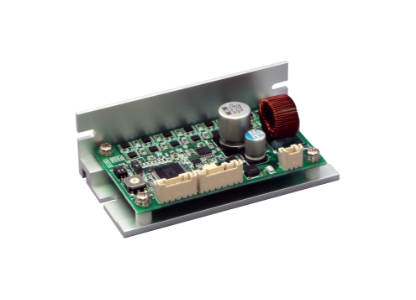
モータードライバ一覧

価格(JPY)
¥38,000
図面ダウンロード

価格(JPY)
¥16,000
図面ダウンロード
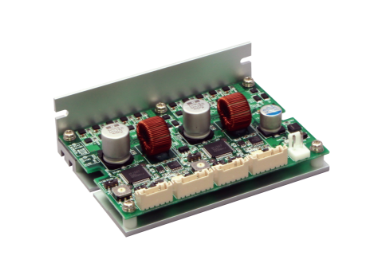
価格(JPY)
¥31,000
図面ダウンロード
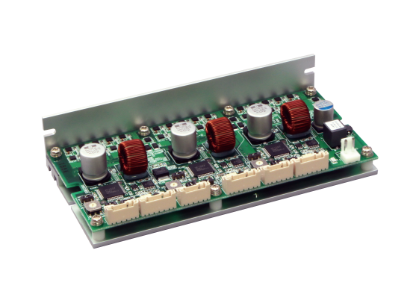
価格(JPY)
¥44,000
図面ダウンロード
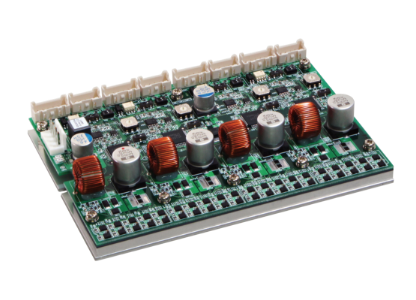
価格(JPY)
¥58,000
図面ダウンロード
モーターケーブル・ドライバケーブル
ステージとコントローラ・ドライバ間の接続用に別売にてケーブルをご用意しております。
ケーブルの長さ・種類などで各種タイプがありますので、使用状況に適したものを選定してください。
モーターケーブル

| コントローラ側 コネクタ形状 |
モーターリード線 | ステージ側 コネクタ形状 |
長さ(m) | ケーブル材 | 型式 | 価格(JPY) | |
|---|---|---|---|---|---|---|---|
| D-sub 15pin | 5本 | 丸型20pin | 3 | 標準(Φ7.4) | CB1503 | ¥8,500 | |
| ロボット(Φ7.3) | RCB1503 | ¥15,500 | |||||
| 5 | 標準(Φ7.4) | CB1505 | ¥9,000 | ||||
| ロボット(Φ7.3) | RCB1505 | ¥21,500 | |||||
| 10 | 標準(Φ7.4) | CB1510 | ¥11,000 | ||||
| ロボット(Φ7.3) | RCB1510 | ¥36,500 |
ドライバケーブル

| ドライバ側 コネクタ形状 |
モーターリード線 | ステージ側 コネクタ形状 |
長さ(m) | ケーブル材 | 型式 | 価格(JPY) | |
|---|---|---|---|---|---|---|---|
| ケーブル切断面 (コネクタ無し) |
5本 | 角型20pin | 3 | 標準(Φ7.4) | CA03VL | ¥6,000 | |
| ロボット(Φ7.3) | RCA03VL | ¥13,000 | |||||
| 5 | 標準(Φ7.4) | CA05VL | ¥8,500 | ||||
| ロボット(Φ7.3) | RCA05VL | ¥19,000 | |||||
| 10 | 標準(Φ7.4) | CA10VL | ¥10,000 | ||||
| ロボット(Φ7.3) | RCA10VL | ¥34,000 | |||||
丸型 20pin |
3 | 標準(Φ7.4) | CB03VL | ¥6,000 | |||
| ロボット(Φ7.3) | RCB03VL | ¥13,000 | |||||
| 5 | 標準(Φ7.4) | CB05VL | ¥8,000 | ||||
| ロボット(Φ7.3) | RCB05VL | ¥19,000 | |||||
| 10 | 標準(Φ7.4) | CB10VL | ¥10,000 | ||||
| ロボット(Φ7.3) | RCB10VL | ¥34,000 |
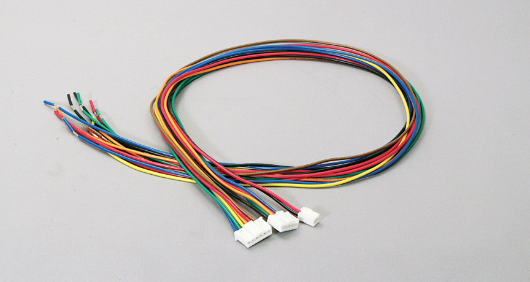
モーター結線変換ケーブル
10本モーターリード線のステージを、
「5本モーターリード線 丸型20pin仕様」へ変換するケーブルです。
下記以外の長さが必要な場合はお問い合わせください。
| コントローラー側 コネクタ形状 |
ステージ側 コネクタ形状 |
長さ(m) | ケーブル材 | 型式 | 価格(JPY) |
|---|---|---|---|---|---|
| 延長(丸型20pin) | 角型20pin | 0.2 | ロボット | RCABJXV-002 | ¥14,000 |
| 丸型20pin | 0.2 | ロボット | RCBBJXV-002 | ¥14,000 |
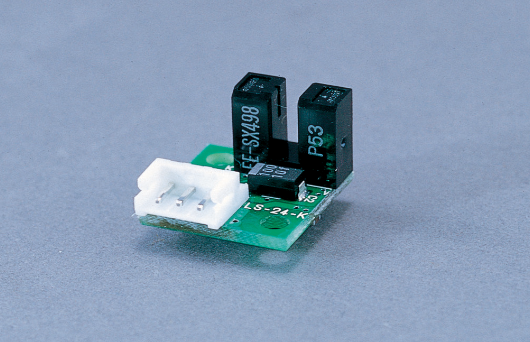
フォトセンサ基板
リミット検出用、原点センサ用として取り付けられているフォトセンサは、
弊社のコントローラの規格に準拠したものを取り付けていますが、お客様側のコントローラ仕様に合わせて、
センサ出力の論理を変更できます。
| 型式 | 価格(JPY) |
|---|---|
| F-101 | ¥5,000 |
| F-102 | ¥5,000 |
| F-103 | ¥5,000 |
| F-104 | ¥2,000 |
| F-105 | ¥2,000 |
| 型式 | 価格(JPY) |
|---|---|
| F-106 | ¥3,000 |
| F-106R | ¥3,000 |
| F-107 | ¥2,000 |
| F-108 | ¥2,000 |
| F-113 | ¥1,500 |
| 型式 | 価格(JPY) |
|---|---|
| F-115 | ¥5,000 |
| F-115R | ¥5,000 |
| F-116 | ¥5,000 |
| F-116R | ¥5,000 |
| PM-L25 | ¥2,000 |
ステッピングモーターのトルク特性
(AC)はAC100V電源のモータードライバーで動作させた場合です(ハーフステップ)。
(DC)はDC+24V電源のモータードライバーで動作させた場合です(ハーフステップ)。
(DC)はDC+24V電源のモータードライバーで動作させた場合です(ハーフステップ)。
![PK513PB(AC) パルス速度(ハーフステップ時)[pps] PK513(DC) パルス速度(ハーフステップ時)[pps]の図](https://www.kohzu.co.jp/wp-content/themes/kohzu/assets/img/products/control-electronics/img_18.jpg)
![PK523MB(AC) パルス速度(ハーフステップ時)[pps] PK523MB(DC) パルス速度(ハーフステップ時)[pps]の図](https://www.kohzu.co.jp/wp-content/themes/kohzu/assets/img/products/control-electronics/img_19.jpg)
![PK524MB(AC) パルス速度(ハーフステップ時)[pps] PK524MB(DC) パルス速度(ハーフステップ時)[pps]の図](https://www.kohzu.co.jp/wp-content/themes/kohzu/assets/img/products/control-electronics/img_20.jpg)
![PK525MB(AC) パルス速度(ハーフステップ時)[pps] PK525MB(DC) パルス速度(ハーフステップ時)[pps]の図](https://www.kohzu.co.jp/wp-content/themes/kohzu/assets/img/products/control-electronics/img_21.jpg)
![PK544MB(AC) パルス速度(ハーフステップ時)[pps] PK544MB(DC) パルス速度(ハーフステップ時)[pps]の図](https://www.kohzu.co.jp/wp-content/themes/kohzu/assets/img/products/control-electronics/img_22.jpg)
![C090P-9015P(AC) パルス速度(ハーフステップ時)[pps] C090P-9015P(DC) パルス速度(ハーフステップ時)[pps]の図](https://www.kohzu.co.jp/wp-content/themes/kohzu/assets/img/products/control-electronics/img_23.jpg)
![C087QP-9215P(AC) パルス速度(ハーフステップ時)[pps] C087Q-9215P(DC) パルス速度(ハーフステップ時)[pps]の図](https://www.kohzu.co.jp/wp-content/themes/kohzu/assets/img/products/control-electronics/img_24.jpg)
![PK545-B(AC) パルス速度[pps] PK545-B(DC) パルス速度[pps]の図](https://www.kohzu.co.jp/wp-content/themes/kohzu/assets/img/products/control-electronics/img_25.jpg)
![PK564-B(AC) パルス速度[pps] PK564-B(DC) パルス速度[pps]の図](https://www.kohzu.co.jp/wp-content/themes/kohzu/assets/img/products/control-electronics/img_26.jpg)
![PK566-B(AC) パルス速度[pps] PK566-B(DC) パルス速度[pps]の図](https://www.kohzu.co.jp/wp-content/themes/kohzu/assets/img/products/control-electronics/img_27.jpg)
![PK569-B(AC) パルス速度[pps] PK569-B(DC) パルス速度[pps]の図](https://www.kohzu.co.jp/wp-content/themes/kohzu/assets/img/products/control-electronics/img_28.jpg)
初期設定変更機種
コントローラの初期設定変更が必要な機種について
弊社標準ステージの原点復帰方法にはいくつかの方式があります。
その為、標準ステージと標準コントローラ(KOSMOSシリーズ)の組み合わせでも、
コントローラ出荷時の原点復帰方式を初期設定から変更して頂く場合があります。
ご使用の際には、ステージのセンサ方式とコントローラの設定を取扱説明書にてご確認ください。
その為、標準ステージと標準コントローラ(KOSMOSシリーズ)の組み合わせでも、
コントローラ出荷時の原点復帰方式を初期設定から変更して頂く場合があります。
ご使用の際には、ステージのセンサ方式とコントローラの設定を取扱説明書にてご確認ください。
初期設定から原点復帰方式の変更が必要なステージと、コントローラの設定値(SYS No.2)
| ステージタイプ | ステージ型式 | 設定値(初期設定:4) | 原点復帰方式 |
|---|---|---|---|
| Xステージ | XA16F-L2101 (-R) | 1 | 領域センサ(データム)を 利用しています。 |
| XA16F-L2201 (-R) | |||
| XA16F-L2301 (-R) | |||
| XA20F-L2401 (-R) | |||
| XA20F-L2501 (-R) | |||
| SXA0530-R01 (-R) | |||
| SXA0750-R01 (-R) | |||
| SXA0775-R02 (-R) | |||
| SXA1075-R01 (-R) | |||
| XYステージ | YA16F-L21101 | 1 | 領域センサ(データム)を 利用しています。 |
| YA16F-L22101 | |||
| YA16F-L22201 | |||
| YA16F-L23101 | |||
| YA16F-L23101 | |||
| YA16F-L23301 | |||
| SYA0530-R01 | |||
| SYA0750-R01 | |||
| SYA0775-R02 | |||
| SYA1075-R01 | |||
| Zステージ | ZA04A-W101 | 7 または 8 | リミット原点方式を推奨。 |
| ZA10A-32F01 | 1 | 領域センサ(データム)を 利用しています。 |
|
| ZA16A-32F01 | |||
| 回転ステージ | RA04A-W101 | 7 または 8 | リミット原点方式を推奨。 |
フィードバック仕様位置決めステージの結線
フィードバック仕様位置決めステージ(特注対応)
弊社モンブランシリーズ位置決めステージにリニアスケールを取り付けることにより更に高精度な位置決めが可能になります。
特に、ロストモーション、繰り返し位置決め精度が向上します。
また、リニアスケールのインクリメンタル信号をコントローラに接続するフィードバックケーブルをオプションで提供します。
より早く、確実な位置決めをご要望の際には、弊社営業部までお問い合わせください。
特に、ロストモーション、繰り返し位置決め精度が向上します。
また、リニアスケールのインクリメンタル信号をコントローラに接続するフィードバックケーブルをオプションで提供します。
より早く、確実な位置決めをご要望の際には、弊社営業部までお問い合わせください。

弊社コントローラ使用時のシステム構成
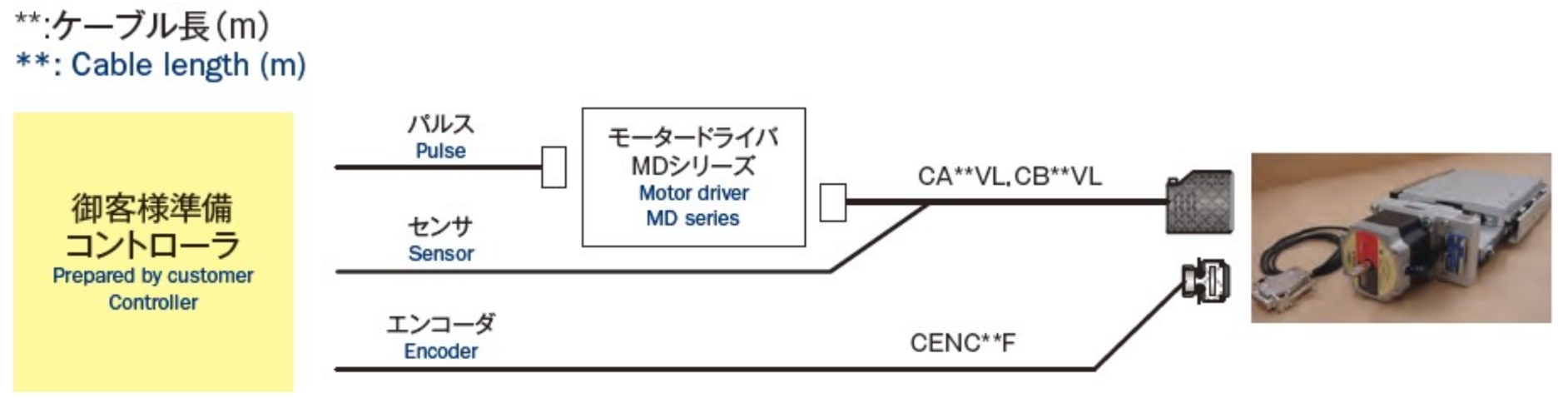
コントローラ御客様準備時のシステム構成
よくあるご質問
制御装置について、よくあるご質問。